End of arm tooling (EOAT)
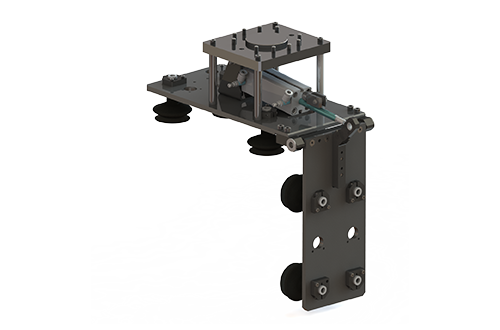
End of arm tooling (EOAT) is an assembly unit used to fold and form a box from a non-folded carton blank. The gripper activates and folds the carton box by tilting the flap 90 degrees.
The gripper is attached to the robot, which uses the suction cups affixed on it to create suction and remove the carton blank along with the gripper from the carton blank feeder. The gripper actuates and folds the flap by tilting it 90 degrees, giving the carton blank its box shape.
- A single gripper works for all sizes of carton blanks
- Effective in constructing the carton box for all SKU sizes
- Low maintenance
- Easy to assemble
- Small and effective for folding and molding carton boxes
- High-performance instrument that can efficiently and precisely pick up and form cartons
- Comes with high-quality suction cups
- Rotation Angle: 90 degree
- Max Feed Force (at 6 bar): 294.52 N
- Max pullout Force (Carton): 2.5 Kg
- System weight: 9.3 kg
- Variable Vacuum pressure
- Can be used to pull and form carton boxes from a carton blank feeder
- Utilized to manufacture carton boxes for various blanks, as long as the carton blank size can be handled by the gripper